Değerli arkadaşlar,
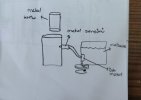
Herkese sağlıklı mutlu ve bol kazançlı bir yıl diliyorum. Umarım yardımcı olacak birisi çıkar. Resimde gösterildiği şekilde basit bir geridönüşümü ardunio ile yapmak/yaptırmak istiyorum. Alüminyum bir metal meşrubat kutusu hazneye atıldıktan sonra metal sensörü tarafından onaylanacak ve onay alındığında bir dc motoru bir tam tur döndürerek haznede bulunan malzemeden bir miktarı dışarıya dökecek. Dah önce hiç ardunio tecrübem yok. Bunu nasıl yapabilirim ya da hazır bir set varsa nereden satın alabilirim. Cevap veren arkadaşlarıma şimdiden çok teşekkür ederim. Çizimin basitliği için özür dilerim.
Saygılarımla,
Herkese sağlıklı mutlu ve bol kazançlı bir yıl diliyorum. Umarım yardımcı olacak birisi çıkar. Resimde gösterildiği şekilde basit bir geridönüşümü ardunio ile yapmak/yaptırmak istiyorum. Alüminyum bir metal meşrubat kutusu hazneye atıldıktan sonra metal sensörü tarafından onaylanacak ve onay alındığında bir dc motoru bir tam tur döndürerek haznede bulunan malzemeden bir miktarı dışarıya dökecek. Dah önce hiç ardunio tecrübem yok. Bunu nasıl yapabilirim ya da hazır bir set varsa nereden satın alabilirim. Cevap veren arkadaşlarıma şimdiden çok teşekkür ederim. Çizimin basitliği için özür dilerim.
Saygılarımla,