s.dogacolakoglu
Üye
- Katılım
- 27 Aralık 2021
- Mesajlar
- 15
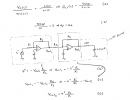
Öncelikle 4. sınıf Elektrik-Elektronik Mühendisliği öğrencisiyim. Kontrol dersine karşı büyük bir ilgim var. Bazen kontrol dersinin temellerini oturtabilmek için bazı sistemlere kontrolör tasarlamaya çalışıyorum fakat bazı şeyleri kafamda net olarak oturtamıyorum. Örnek olarak 3 adet görsel bıraktım. Robotik dersi almadığım için kinematik denkemler yerine Newton'un 2. hareket yasasını kullanarak önce sistemi modelledim (doğruluğundan emin değilim). Ayrıca motor'un sabit bir tork ürettiğini varsayarak sistemi basitleştirmek istedim. Teorik olarak temel bir alt yapım olduğunu düşünüyorum fakat anlamadığım nokta bir kontrolcü tasarlıyoruz, hedef bir sistem belirliyoruz. Sonrasında kıyas yaparak kp ve kd değerlerini buluyoruz (PD kontrolcü tasarladığımızı varsayıyorum). Bu kp ve kd değerlerini teorik olarak buluyoruz fakat bunlar gerçekte sistemi nasıl etkiliyor ve sisteme tam olarak nasıl entegre ediliyor bunu bir türlü somut olarak kafamda oturtamıyorum. Bu noktada bu dersi nasıl kafamda somutlaşırabileceğim, öğrenebileceğim konusunda yardımcı bir kaynak önerirseniz ve özellikle kontrol alanında kendimi nasıl geliştirebileceğim ile ilgili önerilerde bulunursanız çok sevinirim. Şimdiden cevaplarınız için teşekkür ederim.






")