Selamın Aleyküm arkadaşlar,
Bu aralar uğraştığım yüksek lisans tezimi deney savfası büyük ölçüde bitirdim.
Dtc asenkron motoru encodersiz olarak sürdüm.Hızlanma, yavaşlama,ani kalkış,ters dönme, akı zayıflatma gibi
Üniversitede bunları yaparken bir yandan skaler kontrol için evde.Bugün bir test yaptım malesef IR2110 3 de yandı.
STM32 kodunu ve sinyal çıkışları size yolluyorum.
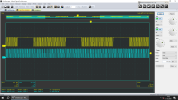
1.resimde B ve C fazları 30hz.
2.resimde A ve B fazı 30hz
1.sorum neden A fazı B ,C fazlarını dibi tam dolulukta olmuyor?
main.c ise ise şu şekilde kodlanmış;
void sineValuesGeneration(int freq){
nValues = 2*floor(9000/freq);
phaseB = 1*floor(nValues/3.00) + phaseA;
phaseC = 2*floor(nValues/3.00) + phaseA;
for(uint16_t i = 0; i < (nValues/2); i++){
sinValues = round(999.00*(0.5*m*sin(i*2*3.14159265358979323846/nValues)+0.5));
}
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if((counter + phaseA)%nValues < (nValues/2)){
TIM1->CCR1 = sinValues[(counter + phaseA)];
}
else{
TIM1->CCR1 = 999-sinValues[(counter + phaseA)%(nValues/2)];
}
if((counter + phaseB)%nValues < (nValues/2)){
TIM1->CCR2 = sinValues[counter + phaseB];
}
else{
TIM1->CCR2 = 999-sinValues[(counter + phaseB)%(nValues/2)];
}
if((counter + phaseC)%nValues < (nValues/2)){
TIM1->CCR3 = sinValues[counter + phaseC];
}
else{
TIM1->CCR3 = 999-sinValues[(counter + phaseC)%(nValues/2)];
}
counter++;
if(counter > nValues) counter = 0;
}
arr 1000-1,prsecaler 8-1 dir.
Bu aralar uğraştığım yüksek lisans tezimi deney savfası büyük ölçüde bitirdim.
Dtc asenkron motoru encodersiz olarak sürdüm.Hızlanma, yavaşlama,ani kalkış,ters dönme, akı zayıflatma gibi
Üniversitede bunları yaparken bir yandan skaler kontrol için evde.Bugün bir test yaptım malesef IR2110 3 de yandı.
STM32 kodunu ve sinyal çıkışları size yolluyorum.
1.resimde B ve C fazları 30hz.
2.resimde A ve B fazı 30hz
1.sorum neden A fazı B ,C fazlarını dibi tam dolulukta olmuyor?
main.c ise ise şu şekilde kodlanmış;
void sineValuesGeneration(int freq){
nValues = 2*floor(9000/freq);
phaseB = 1*floor(nValues/3.00) + phaseA;
phaseC = 2*floor(nValues/3.00) + phaseA;
for(uint16_t i = 0; i < (nValues/2); i++){
sinValues = round(999.00*(0.5*m*sin(i*2*3.14159265358979323846/nValues)+0.5));
}
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if((counter + phaseA)%nValues < (nValues/2)){
TIM1->CCR1 = sinValues[(counter + phaseA)];
}
else{
TIM1->CCR1 = 999-sinValues[(counter + phaseA)%(nValues/2)];
}
if((counter + phaseB)%nValues < (nValues/2)){
TIM1->CCR2 = sinValues[counter + phaseB];
}
else{
TIM1->CCR2 = 999-sinValues[(counter + phaseB)%(nValues/2)];
}
if((counter + phaseC)%nValues < (nValues/2)){
TIM1->CCR3 = sinValues[counter + phaseC];
}
else{
TIM1->CCR3 = 999-sinValues[(counter + phaseC)%(nValues/2)];
}
counter++;
if(counter > nValues) counter = 0;
}
arr 1000-1,prsecaler 8-1 dir.