Mikro Step
Kıdemli Üye
- Katılım
- 25 Eylül 2022
- Mesajlar
- 8,326
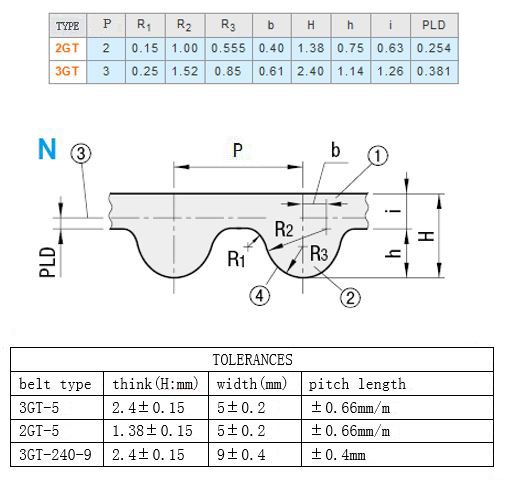
Elimdeki trigger kayis ve kasnakta mm/tur hesabinda sasma var.
Abartili ornekle bir hesap yapalim.
Kayisimizin kalinligi 10mm olsun.
Kasnagimizin capi da 100mm olsun.
Kayisi kasnagin etrafina dolayinca kayisin yaptigi kivrimda icten ice cap 100mm
distan disa cap ta 120mm olacak.
Kasnagin 1 turunda kayisin kac mm ilerleyecegini neye gore hesaplayacagiz?
Ic captan hesaplarsak tur basina ilerleme, 100pi dis captan hesaplarsak 120pi olacak.
Gozlemlerime gore araba 110pi ye yakin ilerliyor.
Ama neden?
Kasnak capim 12mm. Kayis takinca kayis ustunden olculen cap 14mm.
Tur basina ilerleme yaklasik 40mm.
Internette bakindigim sitelerde ic cap ile dis cap arasinda ara bir deger gosteriliyor.

Abartili ornekle bir hesap yapalim.
Kayisimizin kalinligi 10mm olsun.
Kasnagimizin capi da 100mm olsun.
Kayisi kasnagin etrafina dolayinca kayisin yaptigi kivrimda icten ice cap 100mm
distan disa cap ta 120mm olacak.
Kasnagin 1 turunda kayisin kac mm ilerleyecegini neye gore hesaplayacagiz?
Ic captan hesaplarsak tur basina ilerleme, 100pi dis captan hesaplarsak 120pi olacak.
Gozlemlerime gore araba 110pi ye yakin ilerliyor.
Ama neden?
Kasnak capim 12mm. Kayis takinca kayis ustunden olculen cap 14mm.
Tur basina ilerleme yaklasik 40mm.
Internette bakindigim sitelerde ic cap ile dis cap arasinda ara bir deger gosteriliyor.
Son düzenleme: