- Katılım
- 24 Şubat 2018
- Mesajlar
- 27,247
her şartta 5 amper sağlayabilen bir kaynak varsa, sürücü'de düzgün çalışıyorsa encoder'e gerek yok.
beslemeye güveniyoruz, sürücüye güvenirsek tamamdır kalanı yazılımkontrolcümüz kim olacak?
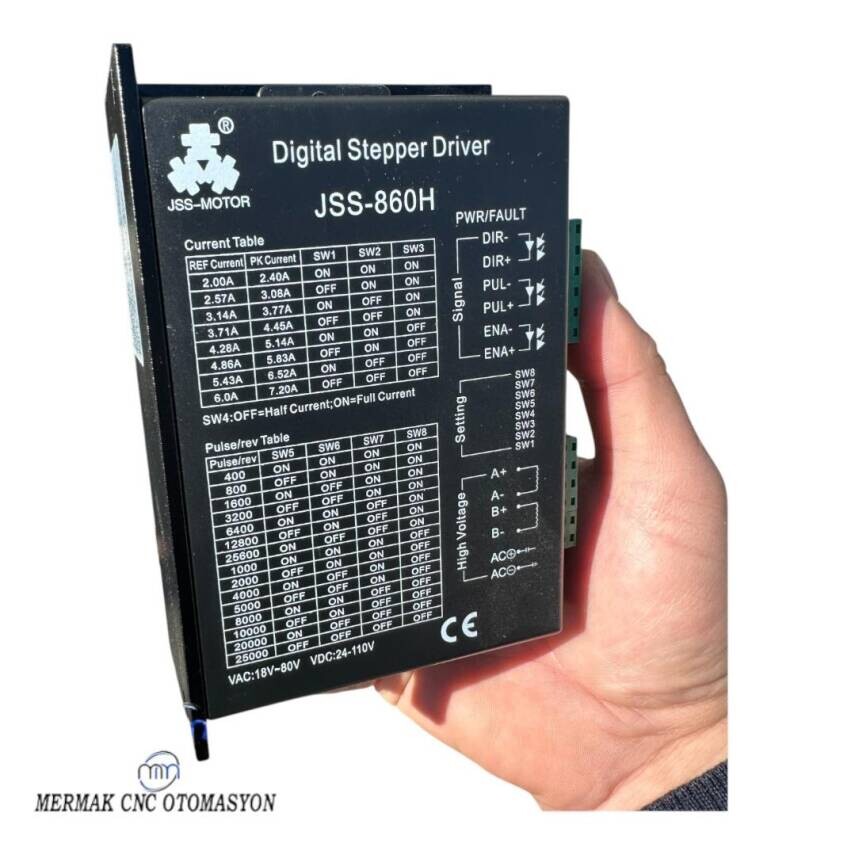
Normal CNC gibi ara ara çalışmayacak step motor. SÜREKLİ olarak ve saatlerce çalışacak. O yüzden step motorun çalışma akımını sürekli, saatlerce verebilecek bir sürücü lazım bana. 3D yazıcılarda kullanılan pire kadar step motor sürücüleri işimi görmez herhalde. Ama yukarıdaki linkini verdiğim sürücüde büyük bir soğutucu ve fan var. Akım değeri de 4 A RMS diyor, step motor 3 A, herhalde sorun çıkmaz. Bunu alayım ben.
Kontrolcü, ekrana sahip herhangi bir geliştirme kartı olacak. Mesela elimde STM32 discovery'ler var. Veya 2x16 LCD display olan bir arduino da olur.


 olabilir mi acaba?
olabilir mi acaba?